Беспилотные автомобили когда изобрели
Краткая история развития беспилотных автомобилей

В последнее время буквально каждый день выходит новость, так или иначе, связанная с беспилотными автомобилями. Все крупные автоконцерны активно занимаются разработками робомобилей и технологий для них. У многих людей может возникнуть ложное мнение, что история развития беспилотных транспортных средств берет свое начало в XXI веке. Однако мало кто знает, что первые попытки создания полностью автономного автомобиля были предприняты еще в 1980 году. Например, если зайти в архив статей The New York Times, то по запросу «unmanned vehicles», появится большое количество материала 15 летней давности.
Существуют разные данные, когда точно появились первые полностью автономные транспортные средства. Фактом остается то, что изначально все подобные разработки создавались для военных целей. В начале XX века стали вестись первые исследования в области беспилотных летательных аппаратов. Еще 1916 году Арчибальдом Лоу был создан первый дрон — самолет на радиоуправлении. Во время Первой мировой войны уже активно применялись воздушные торпеды и самоходные немецкие мины.

Впрочем, до середины XX века разработки в области беспилотных технологий носили скорее экспериментальный, чем практический характер, и, так или иначе, без непосредственного участия человека ни одна модель не обходилась. Беспилотные автомобили, как и летающие дроны, вначале были обычными прототипами на дистанционном управлении, и лишь постепенно становились автономными.
От научных экспериментов до робомобилей Google
Первые эксперименты по созданию беспилотной машины датируются началом 1960-х годов. В 1961 году студент Стэнфордского университета Джеймс Адамс в рамках своей научной работы создал прототип самоуправляемой тележки, более известной, как «Стэнфордская тележка».

Самая первая модель управлялась посредством передачи сигнала через кабель. Второй прототип Адамс уже сделал радиоуправляемым. В 1970-х годах математик Джон Маккарти усовершенствовал тележку, оснастив ее системой технического зрения, с помощью которого устройство могло частично автономно двигаться, ориентируясь на белую линию. Тележка также имела несколько камер, дальномер и четыре канала для сбора информации. Более того Маккарти были предприняты попытки создания трехмерного картографирования окружающей обстановки.
В последующие годы основные усилия инженеров в основном были направлены на разработку уже полностью автономного, а не дистанционного управляемого транспорта. На начальных этапах наибольших успехов добились ученые из США, Японии и Германии. Так, по утверждениям независимых экспертов, первый полностью автономный автомобиль удалось создать группе немецких исследователей под руководством пионера робототехники Эрнста Дикманса в 1980 году.


В середине 1990-х годов большой толчок к развитию беспилотных автомобилей дал прорыв в области искусственного интеллекта, нейронных сетей и машинного обучения. В 2004 году прошло первое в мире соревнование с участием роботов-автомобилей DARPA Grand Challenge, а еще спустя шесть лет Google протестировала свои первые робомобили. После этого идею создания беспилотных автомобилей подхватило большинство крупных автомобильных компаний. В настоящее время наиболее крупными игроками в этой сфере являются компании General Motors, Volkswagen, Audi, BMW, Volvo, Nissan, Google, Tesla Motors и другие.
Итоги и перспективы
Как можно наблюдать, большинство технологий, применяемых в современных беспилотных автомобилях (радары, лидары, различные датчики, системы спутниковой навигации, бортовые компьютеры, камеры и т.д.), были созданы еще более 20 лет назад. Тогда почему беспилотные автомобили до сих пор плотно не вошли в нашу жизнь? По сути, на этот вопрос ответил тот же Дикманс в одной из своих работ. Он сказал, что для того, чтобы робомобиль научился делать все то, что умеет делать профессиональный водитель, ему нужно научиться обрабатывать огромный объем информации и адекватно ее применять в сложной дорожной обстановке.

Поэтому, как полагают ученые, чем дольше автомобиль будет находиться в движении, тем он в большей мере будет получать и применять необходимую информацию. Например, в автомобиль Google перед поездкой заранее устанавливаются карты с маршрутами. Но что делать, если автомобилю придется передвигаться по незнакомым маршрутам? В компании пока не могут дать четкий ответ на этот вопрос. На помощь этой и не только проблеме пришли технологии больших данных, с помощью которых беспилотный автомобиль будет получать, и передавать большие объемы актуальной информации. Кроме того, для нормального функционирования робомобилей требуется существенно изменить дорожную инфраструктуру.
Несмотря на все сложности в интеграции беспилотных автомобилей в современную жизнь, существует одно большое преимущество, которое оправдывает все усилия и финансовые затраты. По официальным данным, в дорожно-транспортных происшествиях ежегодно погибает 1,3 млн. человек. Если в ближайшее десятилетие, доля беспилотных автомобилей составит хотя бы 10%, ежедневно удастся избежать тысяч смертей.
Наше автономное будущее: как появились беспилотные авто (9 фото + 1 видео)

Большинство современных автомобилей, если не рассматривать бюджетный сегмент, уже умеют ездить сами. Они держатся в полосе, тормозят при первой опасности, некоторые могут без помощи человека найти место на парковке и заехать туда. Главный фактор, пока еще сдерживающий автопроизводителей, — отсутствие законодательной базы. Проще говоря, пока не ясно, кто будет виноват в случае аварии. И пока не будет создан прецедент, водителям придется не просто сидеть за рулем, а еще и периодически доказывать машине, что он жив, здоров и способен контролировать ситуацию.
Первые попытки избавиться от шофёра были зарегистрированы еще в далеком 1925 году в США. Изобретатель Фрэнсис Гудина продемонстрировал первый автомобиль, который мог сам завести мотор и переключать передачи, поворачивать руль и даже гудеть. Демонстрационные заезды состоялись в Нью-Йорке, на Манхэттане. Газеты написали, что было впечатление, что машиной управлял призрак. Простые наблюдатели, не посвященные в суть эксперимента, и правда были поражены — открытый Chandler модели 1925 года ехал по мостовой, а за рулем никого не было! Некий намёк на то, что это не совсем простой кабриолет, все-таки имелся: за передним диваном была закреплена огромная ромбовидная железная рама-антенна. Но в 1925 году люди не были так осведомлены об электронике, поэтому на этот конструктивный элемент мало кто обратил внимание. Сам же виновник переполоха, господин Гудина, управлял «призраком водителя» по радиоканалу из седана с закрытым кузовом, ехавшего следом. Фактически, это был не беспилотник, а полномасштабная радиоуправляемая модель, но начало гонки за полной автономностью было положено. Увы, практического применения система Фрэнсиса Гудины не нашла. Пару раз его изобретение использовали в качестве аттракциона, но никто из автогигантов на эксперимент не обратил внимания.

В 1939 году в Нью-Йорке проходила Всемирная выставка, и один из павильонов был подготовлен с участием специалистов из General Motors и известного дизайнера Нормана Бел Геддеса. Речь идет о нашумевшей «Футураме». Кстати, именно в честь нее назван известный мультсериал Мэтта Гронинга. Тот павильон вошел в историю, как один из самых посещаемых — всего было продано около 5 миллионов билетов.



Газотурбинный Pontiac Firebird
Следующая попытка создать беспилотный автомобиль, датирована уже 1953 годом. Американская компания RCA построила миниатюрную модель, которая перемещалась по проводам, проложенным под асфальтом (руководил проектом инженер Лиланд Хэнкок). А уже в 1954 году были построены настоящие участки дороги на 77-м шоссе в Небраске, а за подготовку автомобилей, которые могли принимать сигнал от проводов, снова взялись специалисты из GM. Проект получил самую серьезную поддержку, и вплоть до 1960 года в разных штатах были построены несколько полигонов, где испытывали эту технологию.
История беспилотных автомобилей

Пасхальное воскресенье 1900 года, на фотографии — Пятая авеню, Нью-Йорк. Среди моря конных экипажей едва ли в левой полосе можно разглядеть единственный автомобиль. Пройдет всего 13 лет, и мы увидим аналогичную фотографию, с той разницей лишь, что среди многочисленных автомобилей будет ехать всего одна повозка, запряженная лошадьми.

Часть первая
В настоящий момент автомобильная промышленность переживает одновременно три революции: электрификацию трансмиссии, подключение пассажирских транспортных средств к единой сети и замену водителей автономными системами вождения. Эти процессы не только идут параллельно, но и в значительной мере влияют на автомобилестроение, подобно тому, как в свое время революция подтолкнула заменить конные повозки на самоходный транспорт. Это первая часть короткой серии блогов, в которой делается попытка охватить историю беспилотников, от задумки до производства.
Подписывайтесь на каналы:
@AutomotiveRu — новости автоиндустрии, железо и психология вождения
@TeslaHackers — сообщество российских Tesla-хакеров, прокат и обучение дрифту на Tesla
Первые разработки
Изобретения в области авионики и радиотехники вдохновили создание первых автоматизированных уличных транспортных средств: в 1914 году во Франции был продемонстрирован первый автопилот самолета на гироскопическом стабилизаторе:

Первый автопилот на биплане.
В 1920-х появилось радиоуправление для кораблей:
Беспилотный торпедный катер «Natalie».
Радиоуправляемый автомобиль был впервые представлен компанией RCA в октябре 1921 года в Дейтоне, штат Огайо.

Управление трехколесным транспортным средством осуществлялось беспроводным путем с радиотехнического оборудования на другом автомобиле. Аналогичный радиоуправляемый автомобиль был продемонстрирован в 1925 году на Пятой авеню в Нью-Йорке. За беспилотной машиной вплотную следовал второй автомобиль, в котором находились радиопередатчики и оператор.
Фантастика
Фантазия о беспилотном транспорте почти также стара, как и сам дебют первого автомобиля. А все началось с обыкновенного вымысла.

В 1918 году в одном журнале уже был нарисован трамвай, не управляемый водителем, с подписью: “мечта автомобилиста: автомобиль, который управляется набором кнопок.” В статье говорилось, что “… в будущем автомобиль с рулевым колесом также устареет, как сегодня устарел автомобиль с ручным насосом для газа или масла!»
В 1933 году «Популярная механика» сообщила, что “они ушли в автоматику”, утверждая, что недавние изобретения, например, автоматическое открывание гаражных ворот и гидроусилитель руля, стали первыми шагами на пути к полностью автоматизированным автомобилям; “можно преобразовать автомобиль так, что он будет самостоятельно заводиться, открывать гаражную дверь и съезжать с проезжей части.”
В фильме 1935 года «Самое безопасное место» Chevrolet предсказал, что “если производитель сможет оснастить каждую машину автоматическим механизмом вождения, автомобиль всегда будет делать именно то, что он и должен делать, выезжая на дорогу. При таком управлении автомобиль не сможет выехать с обочины, не подав сигнал и не учитывая встречное движение. При таком управлении автомобиль будет ехать прямо, а не лавировать в потоке машин. С таким управлением он всегда будет перестраиваться в нужную полосу перед поворотом. Будет всегда останавливаться на знак «стоп». С автоматическим механизмом вождения автомобиль будет притормаживать перед тем, как нарушить движение. Он не будет подрезать машины перед опасным поворотом и всегда будет останавливаться перед жд переездом.”
В 1938 году «Популярная наука» в статье «Автострады будущего» предсказала, что через 50 лет аварии будут невозможны, связь между автомобилями будет осуществляться через инфракрасное излучение, а электрические кабели будут контролировать скорость автомобиля и со временем возьмут на себя полное управление автомобилем.
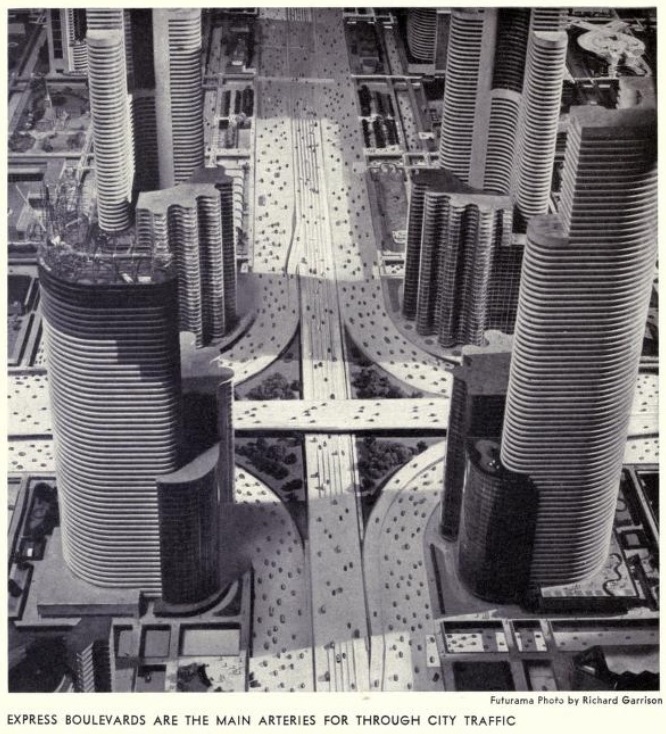
На Всемирной выставке 1939 года в Нью-Йорке General Motors в экспозиции Futurama представил посетителям свое видение 1960 года: автоматизированные транспортные средства на многополосных автомагистралях. Это случилось за 17 лет до того, как Федеральный закон о многополосных автострадах разрешил строительство сети межштатных автомагистралей протяженностью 41 000 миль по всей территории США.
Видео «К новым горизонтам», фильм экспозиции Футурама 1939 года, рассказывает о футуристическом утопическом мышлении накануне Второй мировой войны, которое предсказывал General Motors. В нем запечатлена экспозиция «Футурама» из павильона «К новым горизонтам» General Motors на всемирной выставке, которая устремила свой взор к “чудесному миру 1960-го”.
В 1953 году «Mechanix Illustrated» задал вопрос: “Почему у нас нет… анти-аварийных дорог… С автопилотами, чтобы принять на себя управление вместо вымотанных или пострадавших от аварии водителей? Если изобретатель сможет предложить водителю автопилот для машины, то только подумайте о колоссальной ценности такого устройства. Человеческий фактор будет исключен из процесса вождения. Наши дороги станут практически безаварийными.“ В статье рассматривалась система, основанная на магнитном детекторе, для контроля за боковым движением и радар для соблюдения дистанции.
В 1956 году американские энергокомпании рекламировали, что «в один прекрасный день ваш автомобиль сможет мчаться по электрическому супер-шоссе, его скорость и руление будут автоматически контролироваться электронными устройствами, встроенными в дорогу. Автомобильные дороги станут безопасными благодаря электричеству! Никаких пробок… никаких аварий… никакой усталости водителя.”
В 1956 году для автосалона Motorama General Motors выпустил музыкальный короткометражный фильм „Ключ к будущему“, который ожидал, что в далеком будущем 1976 году будут ездить беспилотные автомобили. В 1958 журнал «Popular Science» писал, что »в вашем будущем автомобиль будет управляться черными ящиками, а вам останется только смотреть», разработкой занимаются GM и RCA.

Firebird III на выставке “Century 21 Exposition”, Сиэтл, 1962 год. Автомобиль должен был управляться с помощью дорожного кабеля, а взаимодействие с инфраструктурой контролировало бы боковое движение.
Firebird IV был не функциональным транспортным средством, как его предшественники, а концепцией, ориентированной на тот день, когда автомобили будут ехать по шоссе и управляться не водителем, а автоматически программируемыми системами наведения, которые обеспечат абсолютную безопасность при развитии скорости более чем в 2 раза от разрешенной сегодня. Как только автомобиль выедет с шоссе, контроль будет передан водителю, и уже он будет вести машину по улицам.
Поп культура
Уолт Дисней вывел воображение на новый уровень.
В эпизоде «Волшебная автострада США» из телесериала 1950-х годов «Волшебный мир Диснея», говорилось о появлении радарных датчиков, ночного видения, системы наведения движения и других футуристических особенностей транспортных средств. Автомобили по-прежнему изображались как существа способные мыслить и чувствовать, принимать собственные решения: в конце 1968 года Дисней создал Herbie, в фильме The Love Bug машина имела «собственный разум и сама собой управляла».
Возможно, самым способным вымышленным роботом-автомобилем в 1980-е годы был KITT из телесериала Knight Rider.
КИТТ управлял собой сам и обладал сканером, который позволял ему «видеть» окружающую среду. Еще больше беспилотных автомобилей появилось в фльмах Christine 1983 года, в Batman 1989-го, Total Recall 1990-го, Demolition Man 1993-го, the Fifth Element 1997-го и I, Robot 2004-го.
Эпоха беспилотных автомобилей началась 100 лет назад. Вдохновленные достижениями в области гироскопических стабилизаторов, радио-и радиолокационных технологий, журналы, газеты и фильмы рисуют автомобили, которые могли бы управлять собой сами. Многие из этих источников ожидали появление технологий примерно через 20 лет, (распространенная временная константа в истории автоматизированных транспортных средств). В то время как изучение беспилотных технологий началось в конце 1950-х — о них речь пойдет в следующей части — потребовалось еще 50 лет, чтобы преодолеть загадочный 20-летний барьер.
Часть вторая: Исследования и разработки
Исследования по созданию беспилотного или роботизированного транспорта начались в конце 1950-х годов. Джеймсон Ветмор подробно описывает 60-летнюю историю создания автоматизированных систем автомобильных дорог в Америке и идеи, лежащие в их основе. Прочитать можно здесь и здесь. В 1958 году General Motors и компания Radio Corporation of America (RCA) совместно проводили испытания автоматизированных прототипов дорог, оснащенных радиоуправляемым контролем скорости и руления автомобиля.

Как писали в 1960 году, магниты, встроенные в транспортные средства, притягивались стальным кабелем, проложенным под дорогой, а диспетчерские вышки следили за общим транспортным потоком. Наступление новой революции казалось настолько неизбежным, что в 1960 году New York Times писал, что к «полномасштабному использованию мы придем через 15 лет».
Впервые сконструированная около 1960-го, Stanford Cart была предназначена для изучения возможности управления луноходом с Земли. В течение последующих десятилетий группа аспирантов дорабатывала карт. Главное усовершенствование внес Ханс Моравек. Он оснастил карт стереозрением, которое позволило ему самостоятельно перемещаться по заполненной стульями комнате — ушло на это всего 5 часов — 1979 год.
Примерно в то же время в центре искусственного интеллекта Стэнфордского исследовательского института Нильс Нильссон разработал Shakey. Это был первый мобильный робот, способный воспринимать окружающую среду через «глаз» телевизионной камеры и с помощью усовидных щупалец. У Shakey также был план действий для выполнения поставленной задачи. Преемником Shakey стал луноход (CMU) Rover, разработанный в Университете Карнеги — Меллона.

Первый автоматизированный автомобиль с восприятием окружающей среды был разработан в 1977 году в лаборатории машиностроения Университета Цукуба. Исследовательская группа занималась разработкой беспилотных транспортных средств на протяжении 20 лет. В этом документе 1994 года говорится о транспортном средстве, сконструированном компанией Toyota. С помощью одной камеры машина была способна проехать по разметке 50 м со скоростью 50 км/ч.
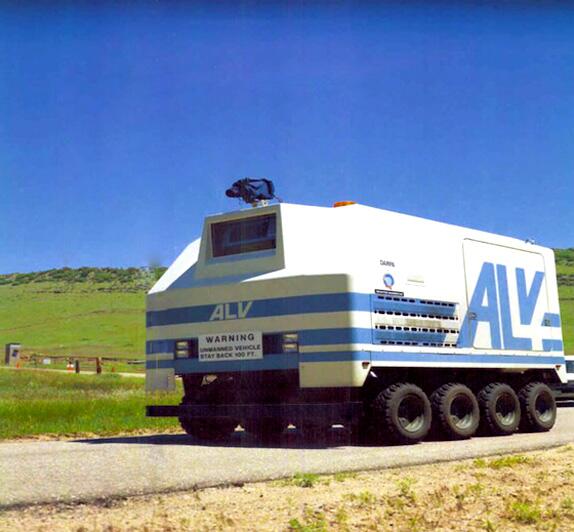
Разработанный в 1980-х годах автономный наземный автомобиль DARPA (ALV) представлял собой восьмиколесного робота высотой 12 футов с несколькими датчиками, перед которым была поставлена задача пройти от точки A до точки B, поднимаясь по холмам без помощи человека. Эксперимент проходил за пределами Денвера в 1985 году.

Это исследование продолжилось в европейском финансируемом государством проекте EUREKA-«Прометей», (PROgraMme для европейского движения с наивысшей эффективностью и беспрецедентной безопасностью), который осуществлялся с 1987 по 1994 год. В него вошли многие европейские участники, а государственное финансирование было значительным.
В 1993 году компания Bosch представила разработанные в рамках проекта «Прометей» навигационные системы и камеры, способные распознавать полосы движения.
Тогда было установлено, что «осмысленное соединение глобальной цифровой карты с локальной сенсорной информацией — ключ к целенаправленному автономному вождению.”
Финальная демонстрация проекта „Прометей“ состоялась на парижской трассе A1, где автомобиль VAmP профессора Дикманнса проехал более 1000 км, развив скорость до 130 км/ч.
Он автоматически пропускал более медленные автомобили в левом ряду и одновременно отслеживал до двенадцати других автомобилей. В 1995 году команда проехала 1758 км от Мюнхена до Дании и обратно со скоростью до 175 км/ч, продольное и боковое управление осуществлялось с помощью компьютерного зрения. Самый большой участок, который удалось проехать в режиме автопилота, составил 158 км. Профессор Дикманс рассказывает о развитии технологий в этой области начиная с 1950-х годов и по настоящий момент на конференции в 2011 году.

Также в 1995 году разработанная в CMU машина Navlab 5 проехала на автопилоте, но с ручным контролем бокового движения, из Питтсбурга, штат Пенсильвания, в Сан-Диего, штат Калифорния, в рамках тура “No Hands Across America”. В этом видео с History Channel 1998 года кратко рассказывается о деятельности CMU Navlab в 1990-е годы:
В 1996 году в Италии, в университете Пармы, Альберто Броджи основал проект ARGO. В 1998 году автомобиль MilleMiglia в рамках тура Automatico проехал в режиме автопилота 2000 км. Отчет команда опубликовала в этом видео 10 лет спустя.
В 1997 году Национальная программа исследования автоматизированных автомобильных систем (NAHS) Министерства транспорта США завершилась тем, что беспилотные автомобили, автобусы и грузовики проехали по трассе I-15 в Сан-Диего, Калифорния.

Контроль за боковым движением осуществлялся с помощью компьютерного зрения и магнитов, встроенных в дорогу. Расстояние между автомобилями регулировали радиолокационные или лидарные датчики.
В немецком исследовательском проекте »Autonomes Fahren», который проходил с 1997 по 2000 год, приняли участие Volkswagen, Bosch, Технический университет Брауншвейга и другие компании.

В рамках проекта на испытательных площадках Volkswagen проводились тест-драйвы производимых автомобилей. Машины были оснащены лидарами, камерами, радарами, GPS, цифровой маршрутной картой.

Чтобы тестируемые машины могли ездить без водителя-испытателя по замкнутому маршруту в смешанном движении среди другого транспорта, в них посадили электромеханических роботов-водителей, которые приводили в действие три педали, переключали передачи и управляли рулевым колесом.

В законе о национальной обороне США от 2001 года говорится, что «цель вооруженных сил состоит в том, чтобы обеспечить применение беспилотных, дистанционно управляемых технологий, так, чтобы… к 2015 году треть оперативных наземных боевых машин Вооруженных сил являлись беспилотными.»
Учитывая назначенный жесткий график, DARPA решило, что соревнование с призовым фондом станет быстрым экономическим выходом и лучшим стимулом для развития инноваций и расширения исследовательского сообщества беспилотных технологий. Первое мероприятие состоялось в 2004 году. Только 15 команд прошли отбор для участия в финальном заезде. Беспилотные самоуправляемые машины попытались пройти по 142-мильному маршруту через пустыню Мохаве (штат Невада), по грунтовым дорогам, равнинам и горным перевалам.
Команды только за 24 часа до начала мероприятия узнали GPS путевых точек. Машина CMU преуспела больше всех, проехав 7,32 мили (менее 5% от всего маршрута). Тем не менее, как правильно заметил Wired, первое из трех соревнований Grand Challenge сформировало сообщество разработчиков беспилотников таким, каким мы его знаем сейчас.

DARPA провела повторное соревнование в 2005 году (DARPA Grand Challenge). Пять команд прошли дистанцию в 132 мили, и все, кроме одного из 23 финалистов, преодолели дистанцию в 7,32 мили — обогнав лучший результат 2004 года.
Робот-автомобиль Stanley, разработанный Себастьяном Труном и его командой из Стэнфордского университета, прибыл на финиш первым, пройдя маршрут за 6 часов 54 минуты. Позже Себастьян рассказал о своей работе в Стэнфорде над Stanley в этой статье и в этой беседе:
Две машины, разработанные в Университете Карнеги-Меллона, Sandstorm и Highlander, прибыли всего через несколько минут после Стэнли. Двенадцать лет спустя команда случайно обнаружит, что фильтр между модулем управления двигателем и топливными форсунками (одной из всего лишь двух электронных частей в двигателе Hummer 1986 года) был сломан и привел к потере мощности двигателя.
Соревнование DARPA Urban Challenge 2007 года DARPA перенесла в городскую местность, на место ныне закрытой военно-воздушной базы Джорджа в Викторвилле, штат Калифорния. Команды должны были пройти маршрут по городу, проезжая через четырехполосные перекрестки, заблокированные дороги или парковки, находясь в смешанном движении с беспилотниками и машинами, управляемыми людьми. Более 90 команд подали заявки на участие в Urban Challenge. 53 команды приняло участие в отборе, 36 были приглашены на полуфинальное мероприятие, и всего 11 приняло участие в финальной гонке.
DARPA сочла необходимым, чтобы в потоке машин рядом с роботами находились люди и представители DARPA, оценивающие производительность роботов. Впервые на мероприятие образовалась пробка из беспилотных автомобилей, а также первое, хоть и незначительное, столкновение двух беспилотников.

Junior Стэнфордского университета и Victor Tango Политехнического университета Виргинии на соревновании DARPA Urban Challenge 2007-го года.

Автомобиль Boss Университета Карнеги-Меллона пересекает финишную черту.
После Urban Challenge проводились ещё несколько, в основном научно-исследовательских, мероприятий. Среди них проект Stadtpilot в Техническом университете Брауншвейг, нацеленный на вождение в городской среде, включая смену полосы движения, парковку и включение в движущийся поток. В 2010 году проект Vislab Intercontinental Autonomous Challenge, в котором колонна из четырех беспилотников, следуя за ведущим автомобилем, проехала 13000 км из Пармы (Италия) до Шанхая (Китай). В 2012 для гонки Pikes Peak в Стэнфорде построили гоночный беспилотник.
Grand Cooperative Driving Challenge – соревнование, проводимое в Европе в 2011 и 2016 годах, в котором машины должны были следовать за лидирующим автомобилем, реагировать на его колебания, совместно стартовать на светофорах и объединяться в колонну.
Соревнование Urban Challenge ознаменовало переход от научных исследований к промышленному развитию — которое мы будем освещать в следующей части. Загадочный 20-ти летний барьер был окончательно преодолен.
Подписывайтесь на каналы:
@AutomotiveRu — новости автоиндустрии, железо и психология вождения
@TeslaHackers — сообщество российских Tesla-хакеров, прокат и обучение дрифту на Tesla
Мы большая компания-разработчик automotive компонентов. В компании трудится около 2500 сотрудников, в том числе 650 инженеров.
Мы, пожалуй, самый сильный в России центр компетенций по разработке автомобильной электроники. Сейчас активно растем и открыли много вакансий (порядка 30, в том числе в регионах), таких как инженер-программист, инженер-конструктор, ведущий инженер-разработчик (DSP-программист) и др.
У нас много интересных задач от автопроизводителей и концернов, двигающих индустрию. Если хотите расти, как специалист, и учиться у лучших, будем рады видеть вас в нашей команде. Также мы готовы делиться экспертизой, самым важным что происходит в automotive. Задавайте нам любые вопросы, ответим, пообсуждаем.